
2025知到答案 机器人学(青岛黄海学院) 最新智慧树满分章节测试答案
第一章 单元测试
1、多选题:
进入21世纪之后,机器人向智能机器人和特种机器人发展方向有哪些特点?( )
选项:
A:能够模拟人类用两条腿走路
B:具有自主控制和决策能力
C:具有视觉和触觉功能
D:能够进行独立操作、自动装配和产品检验
答案: 【能够模拟人类用两条腿走路;
具有自主控制和决策能力;
具有视觉和触觉功能;
能够进行独立操作、自动装配和产品检验】
2、判断题:
美国人乔治·德沃尔在1954年设计了第一台电子程序可编的工业机器人,并于1961年申请( )
选项:
A:对
B:错
答案: 【对】
3、多选题:
电机驱动是一种常见的机器人驱动方式,该种方式具有以下优点。( )
选项:
A:驱动效率高
B:控制方便
C:环保整洁
D:重量轻
答案: 【驱动效率高;
控制方便;
环保整洁】
4、判断题:
气动驱动器使用空气作为工作介质,并使用气源发生器将压缩空气的压力能转换为机械能,以驱动执行器完成预定的运动。( )
选项:
A:对
B:错
答案: 【对】
5、多选题:
微型驱动器是开发微型机器人的基础和关键技术之一,小型化也是机器人发展的一个趋势。下列哪些是微型机器人的优势?( )
选项:
A:移动灵活方便
B:精度高
C:可应用于纳米技术
D:速度快
答案: 【移动灵活方便;
精度高;
速度快】
第二章 单元测试
1、单选题:
我们将物体的几个自由度的状态称为物体的位姿( )
选项:
A:7
B:5
C:4
D:6
答案: 【6】
2、单选题:
坐标旋转方程( )
选项:
A: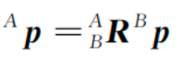
B:
C: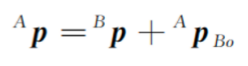
D: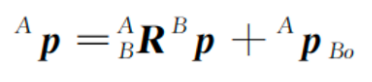
答案: 【】
3、判断题:
齐次坐标[9,6,3]和[6,4,2]都是表示同一个二维点[2,1]。( )
选项:
A:对
B:错
答案: 【对】
4、判断题: ( )
( )
选项:
A:对
B:错
答案: 【错】
5、单选题:
已知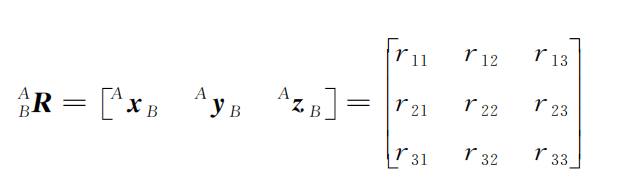 ,
, 的三个位置矢量
的三个位置矢量 都是单位矢量,且双双相互垂直,所以他的9个元素满足如下6个约束条件( )
都是单位矢量,且双双相互垂直,所以他的9个元素满足如下6个约束条件( )
选项:
A: 1
1 0
0
B: 1
1 1
1
C: 0
0 1
1
D: 0
0 0
0
答案: 【10】
支付后可长期查看
有任何疑问及时添加客服QQ:2025479448反馈
网站只是章节,不包含期末
购买期末+QQ:2025479448